




芯片资讯
- 发布日期:2024-01-16 07:39 点击次数:142 概述
本文将介绍如何使用 LPS28DFW 传感器来读取的压强数据,来估算水下深度,可以利用液体静压的原理。 最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。

[https://www.bilibili.com/video/BV1Je411B7jV/]
样品申请[https://www.wjx.top/vm/OhcKxJk.aspx#]
完整代码下载[https://download.csdn.net/download/qq_24312945/88656283]
水压计算对于水平地面的固体对地面产生的压强,由于压力大小等于重力,计算固体压力时一般都会先计算压力后计算压强,所以 F=G 在固体中经常用到,但同时我们又要明确知道压力与重力的不同。对于液体计算公式的由来,同一深度朝各个方向都有压强且相等;密度相同时,深度越深压强越大;深度相同 时,密度越大压强越大。这只是定性的关系,对于定量关系则是建立了一个规则形状的液柱,设想 液柱下方平面的压强就是该位置的液体压强大小。如下图所示,液柱对平面的压力等于液柱所受 的重力,借助于公式的变形 F=G=mg=ρVg=ρgSh ,从而推出 P=F/S=ρgh 。由于液体同一深度朝各个方向都有压强且相等,所以这个公式就可以普遍计算同一深度其他位置的液体压强大小。 其中: ● P 是液体的压力(即气压计测得的压力值),EEPROM带电可擦可编程存储器芯片大全 ● ρ 是液体的密度(通常在20°C下水密度为1000 kg/m³) ● g 是重力加速度(通常取9.8 m/s²), 芯片交易网IC交易网CMOS图像传感器IC集成电路芯片 ● h 是液体的深度。

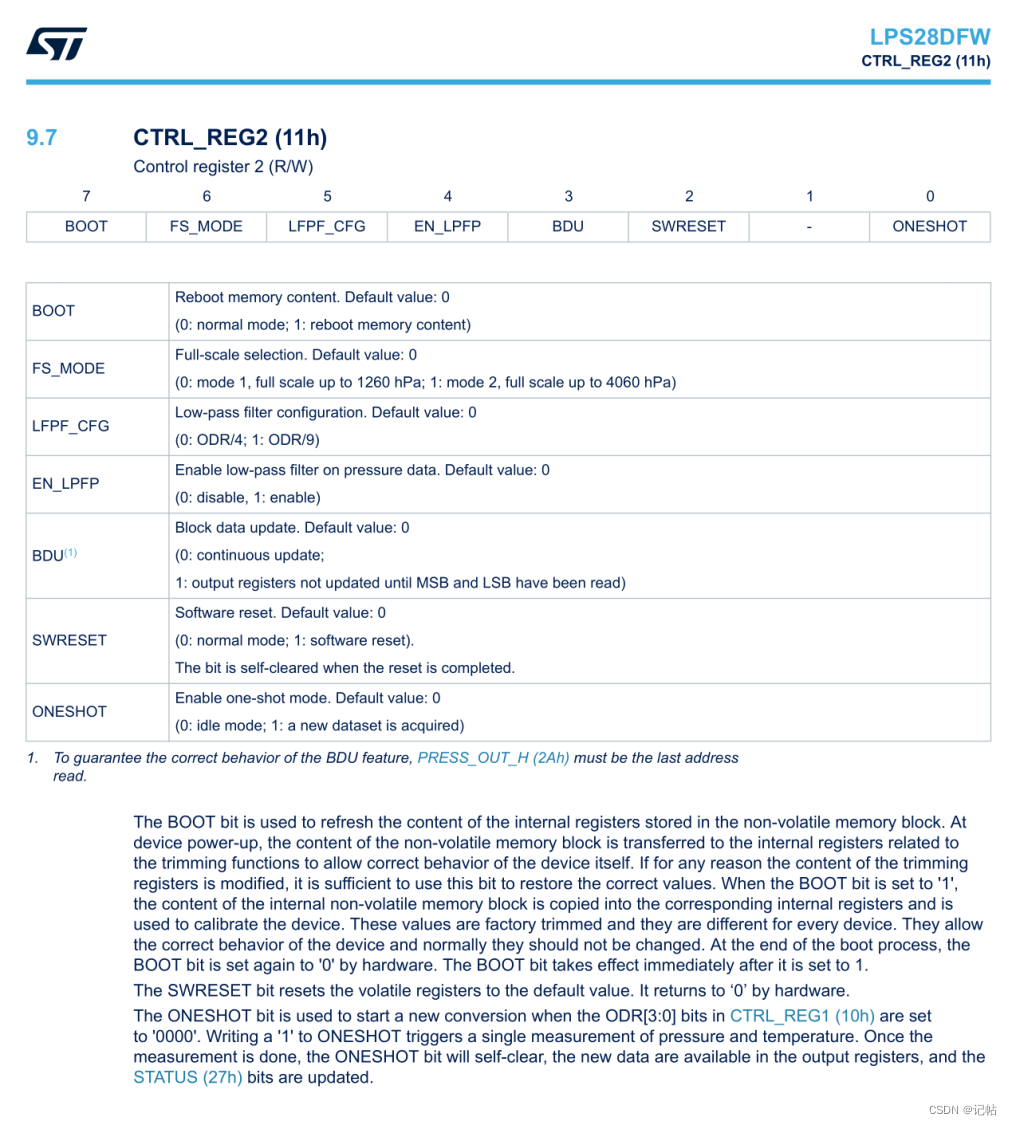
对于 LPS28DFW 气压传感器, ATMEGA系列ATMEL芯片COMCTRL_REG1(10h)和 CTRL_REG2(11h)的主要设置如下: CTRL_REG1(10h) ● ODR[3:0]:输出数据速率选择。默认值:0000。具体的配置值见数据表 19。 ● AVG[2:0]:平均值选择。默认值:000。具体的配置值见数据表 20。 CTRL_REG2(11h) ● BOOT:重新启动内存内容。默认值:0(0:正常模式;1:重新启动内存内容)。 ● FS_MODE:全量程选择。默认值:0(0:模式1, CMOS图像传感器集成电路芯片全量程高达1260 hPa;1:模式2, 电子元器件PDF资料大全全量程高达4060 hPa)。 ● LFPF_CFG:低通滤波器配置。默认值:0(0:ODR/4;1:ODR/9)。 ● EN_LPFP:启用压力数据上的低通滤波器。默认值:0(0:禁用;1:启用)。 ● BDU:块数据更新。默认值:0(0:连续更新;1:直到读取了 MSB 和 LSB 之前,输出寄存器不更新)。 ● SWRESET:软件复位。默认值:0(0:正常模式;1:软件复位)。复位完成时位自动清零。 ● ONESHOT:启用一次性模式。默认值:0(0:空闲模式;1:获取新的数据集)。

 设置输出数据速率 (md.odr = LPS28DFW_1Hz):将输出数据速率设置为每秒 1 次(1Hz)。较低的数据速率通常可以减少噪声,从而提高测量的准确性。 设置平均值 (md.avg = LPS28DFW_512_AVG):选择 512 次平均。这意味着传感器将获取 512 个样本并计算它们的平均值作为最终输出。平均更多的样本可以显著减少随机噪声,从而提高数据的稳定性和准确性。 设置低通滤波器 (md.lpf = LPS28DFW_LPF_ODR_DIV_9):低通滤波器设置为 ODR/9,这将进一步平滑输出数据,消除高频噪声。 设置全量程 (md.fs = LPS28DFW_1260hPa):选择全量程为 1260hPa。这种较低的全量程可能更适合于测量较小的压力变化,进一步提高测量精度。 应用这些设置 (lps28dfw_mode_set(&dev_ctx, &md)):最后,这些配置通过 lps28dfw_mode_set 函数应用于传感器。 这样的设置组合有助于提高 LPS28DFW 传感器的精度,特别是通过降低噪声和增加测量稳定性。这些设置对于需要高精度测量的应用场景特别有用。
设置输出数据速率 (md.odr = LPS28DFW_1Hz):将输出数据速率设置为每秒 1 次(1Hz)。较低的数据速率通常可以减少噪声,从而提高测量的准确性。 设置平均值 (md.avg = LPS28DFW_512_AVG):选择 512 次平均。这意味着传感器将获取 512 个样本并计算它们的平均值作为最终输出。平均更多的样本可以显著减少随机噪声,从而提高数据的稳定性和准确性。 设置低通滤波器 (md.lpf = LPS28DFW_LPF_ODR_DIV_9):低通滤波器设置为 ODR/9,这将进一步平滑输出数据,消除高频噪声。 设置全量程 (md.fs = LPS28DFW_1260hPa):选择全量程为 1260hPa。这种较低的全量程可能更适合于测量较小的压力变化,进一步提高测量精度。 应用这些设置 (lps28dfw_mode_set(&dev_ctx, &md)):最后,这些配置通过 lps28dfw_mode_set 函数应用于传感器。 这样的设置组合有助于提高 LPS28DFW 传感器的精度,特别是通过降低噪声和增加测量稳定性。这些设置对于需要高精度测量的应用场景特别有用。

/* Set Output Data Rate */ md.odr = LPS28DFW_1Hz; md.avg = LPS28DFW_512_AVG; md.lpf = LPS28DFW_LPF_ODR_DIV_9; md.fs = LPS28DFW_1260hPa; lps28dfw_mode_set(&dev_ctx, &md);轮询读取数据
水下每增加一定深度,水的压力就会增加。这个增加的压力与水的深度成正比。公式中减去的 气压值 是为了将传感器读数调整为相对于大气压的压力。这是因为传感器测得的是绝对压力,包括了大气压在内。
公式中的密度和重力加速度用的是标准单位(千克每立方米和米每平方秒),而压强用的是百帕。因此,计算出的水深是以米为单位的。最后,为了将结果以更易读的形式(厘米)展示,乘以了 100*100。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* Read output only if new values are available */
lps28dfw_all_sources_get(&dev_ctx, &all_sources);
if ( all_sources.drdy_pres | all_sources.drdy_temp ) {
lps28dfw_data_get(&dev_ctx, &md, &data);
if(i==0)
{
open_h =data.pressure.hpa;
printf("初始化压强:%6.2fhPa,温度:%6.2frn",open_h,data.heat.deg_c);
i++;
}
else
{
float h;
h=(data.pressure.hpa-open_h)/(1000*9.8);//水深=压强/(水密度*重力加速度)
//1百帕 (hPa)= 100 Pa = 1 mbar1千帕 (kPa)= 1000 Pa = 10 hPa
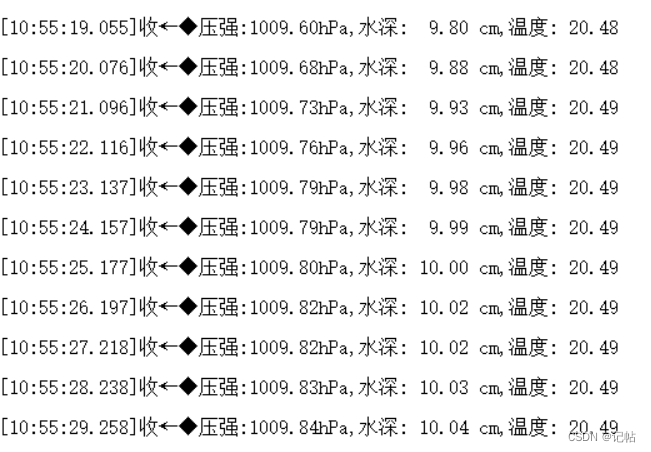
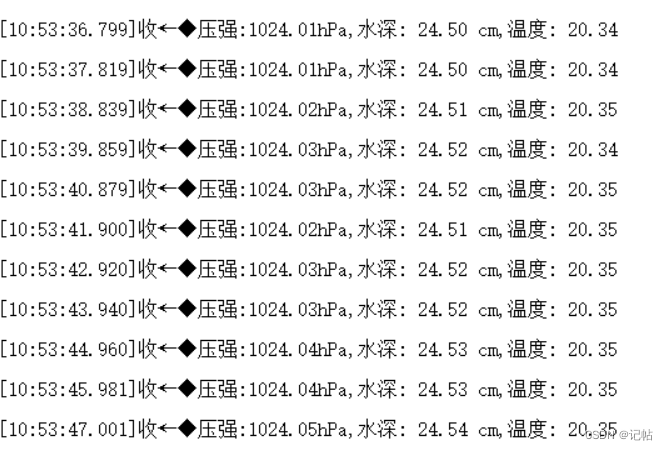
printf("压强:%6.2fhPa,水深:%6.2f cm,温度:%6.2frn",data.pressure.hpa,h*100*100,data.heat.deg_c);
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
测试结果10cm测试情况如下。
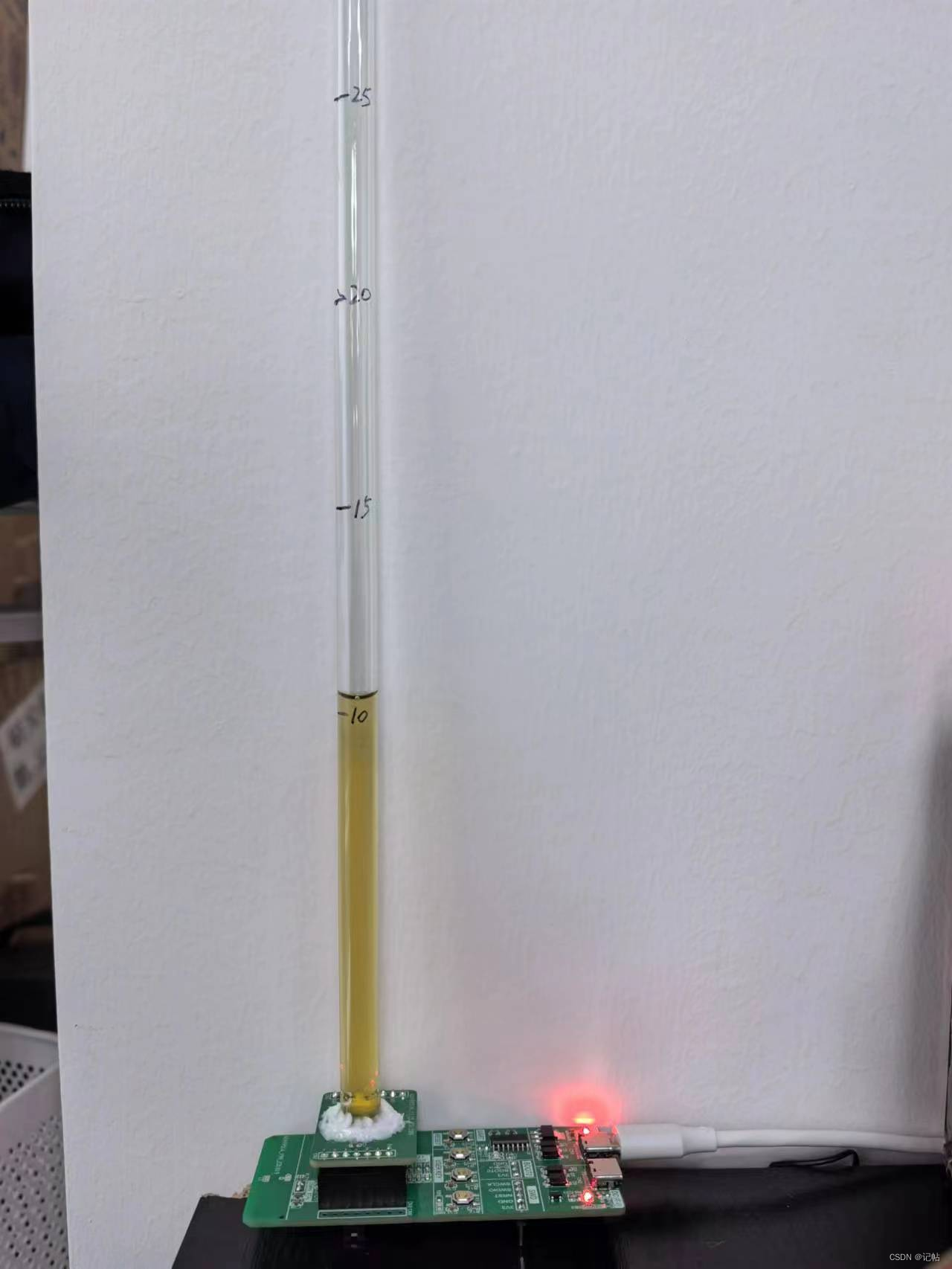
 15cm测试情况如下。
15cm测试情况如下。 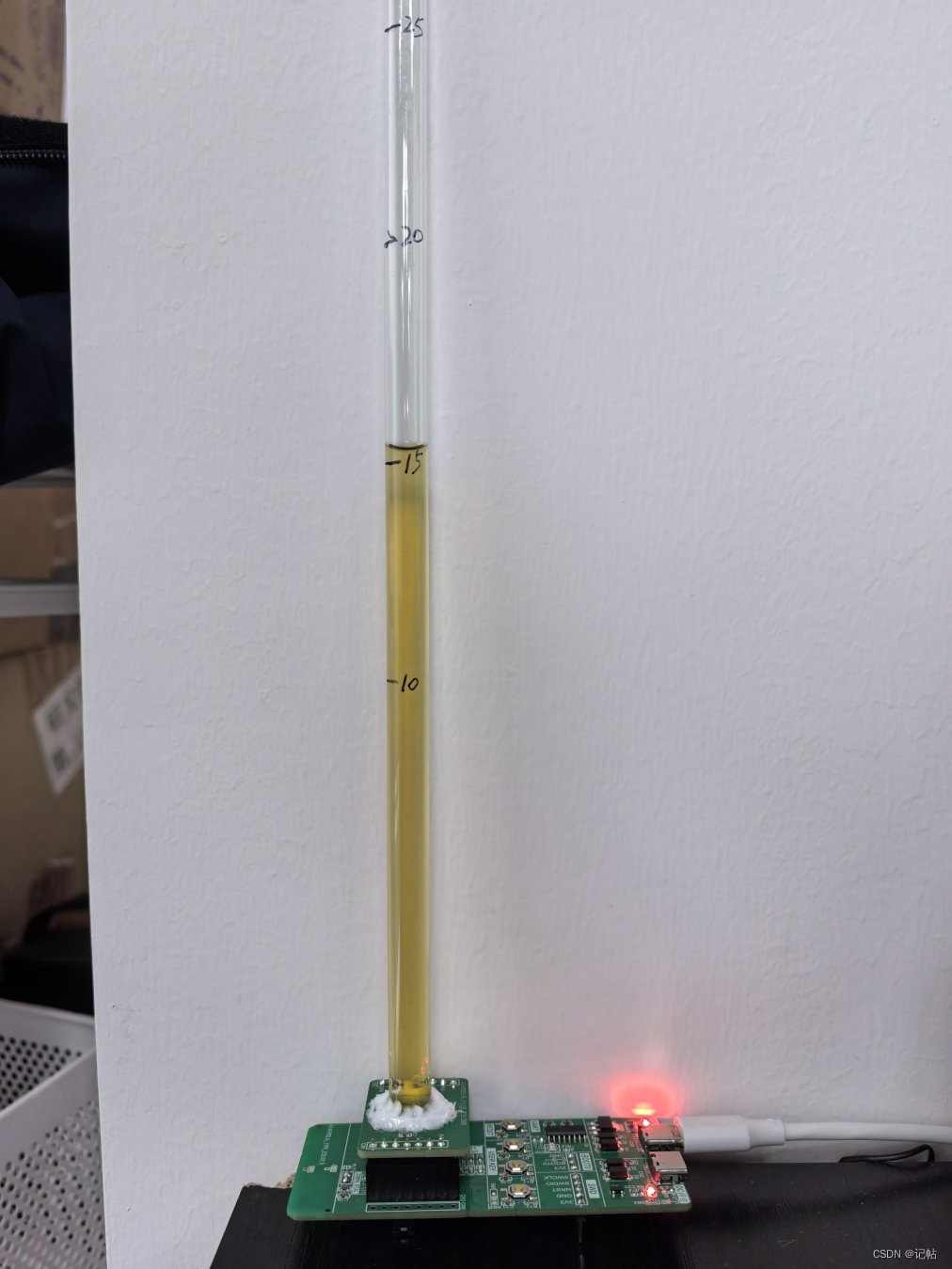
 20cm测试情况如下。
20cm测试情况如下。


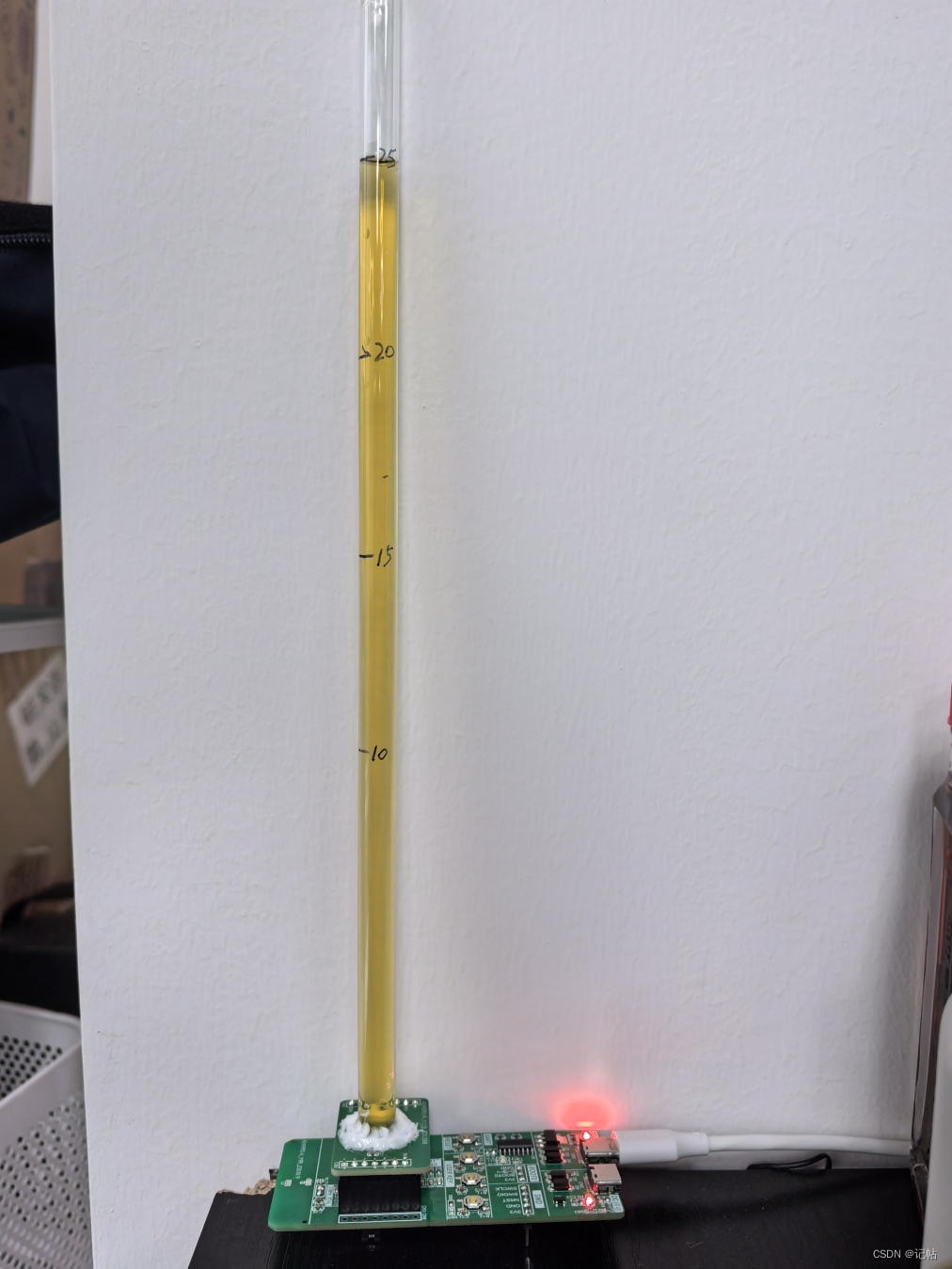
25cm测试情况如下。
- 为 SylixOS 打造最强开发平台!翼辉发布RealEvo 6.0 版本2024-01-05
- 教授团队开发用于在室温下检测氨气的快速反应传感器2024-01-01
- 后台开发中netstat命令使用方法2023-12-31